§ 04 / Gallery
Renders + assembly.
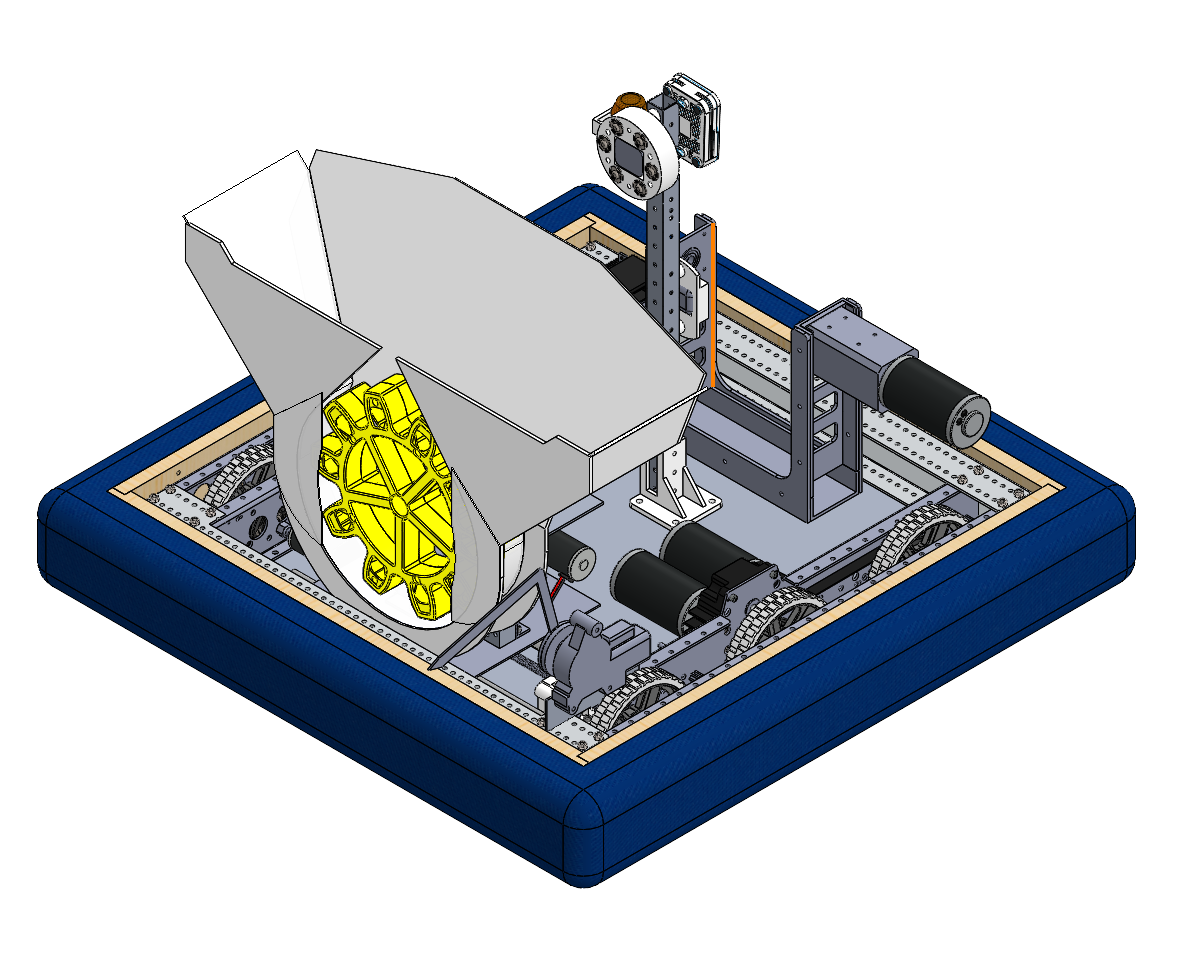
ROBOT CAD
GEAR PUSHER
Place gears on a peg as fast as possible, play defense, climb a rope. The team chose narrow scope on purpose: three things, done well, beats five things done badly.
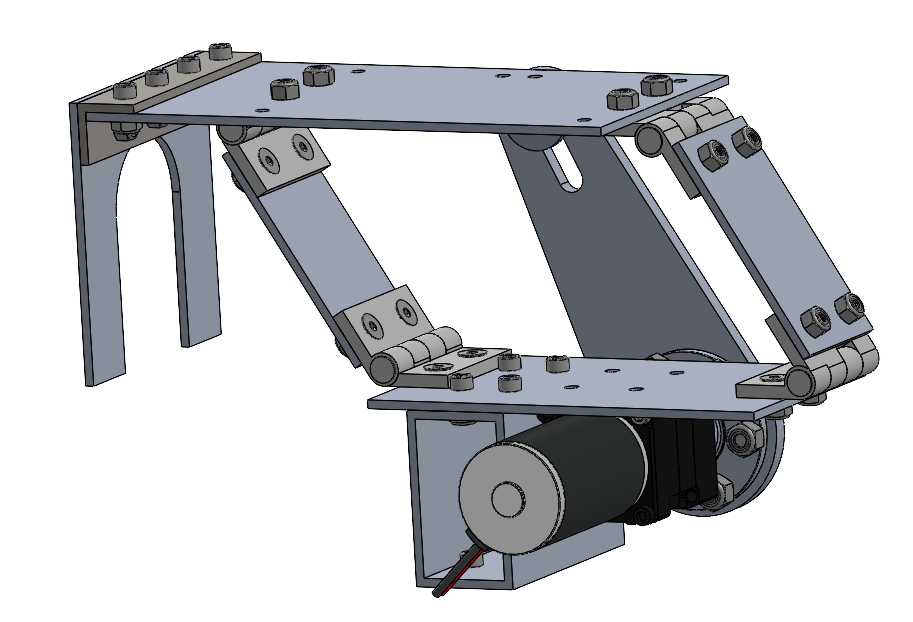
Most of the year was spent prototyping gear-placement mechanisms. We landed on a polycarbonate gear holder with compliant flaps that deflect to let the gear push out under load.
For the climber: a motor with a 100:1 gearbox, sized for the rope load.
The pusher was the part I designed end-to-end. Same tooling constraints as 2016: water jet and off-the-shelf only.
Robot competed strongly at three DC-area events and won an award for Quality. My role had shifted from solo modeling to scaffolding sketches and standards so other students could move faster. First time I led a sub-team's CAD.